Math 5610 - Computational Linear Algebra
Project maintained by BrandonFurman Hosted on GitHub Pages — Theme by mattgraham
The purpose of this page is to compare results on symmetric positive definite linear systems of equations using Jacobi Iteration and the Conjugate Gradient Method. A plot of CPU Time vs. Matrix Size is provided for these two algorithms below. In both cases a tolerance of 0.0001 is used.
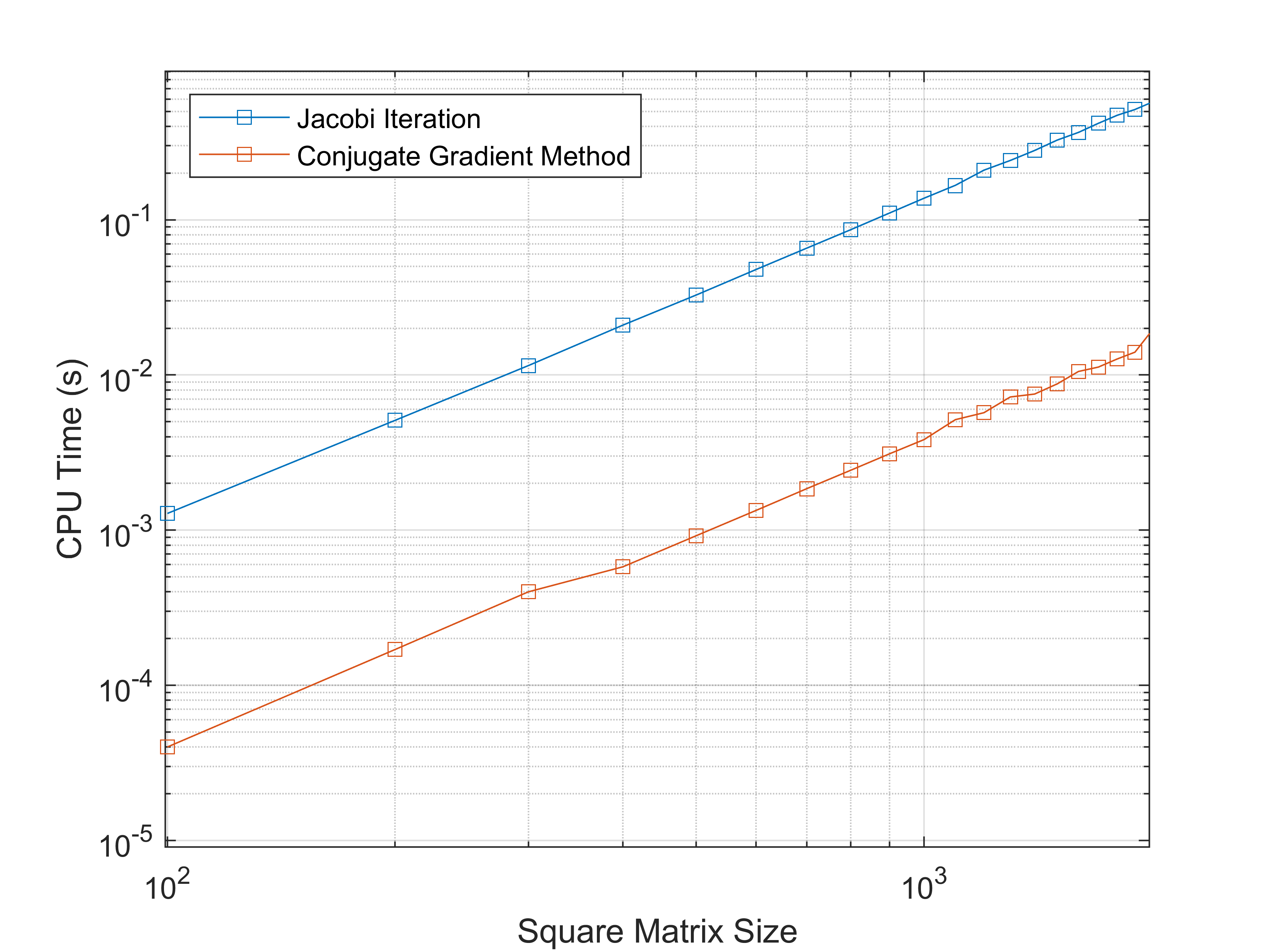
From this graph it can be seen that the Conjugate Gradient Method is more than an order of magnitude faster than Jacobi Iteration at every matrix size between n = 100 and n = 2000. The first graph was produced using the following code:
int N = 100;
int maxIter = 10000;
double tol = 1e-4;
for (int m = 100; m <= 2000; m += 100) {
std::cout << m << " ";
array2D A;
array1D b, x, x1, x2, x3;
A = randSymDiagDomMat(m);
for (int i = 0; i < m; i++) A(i, i) *= 1.1;
b = oneVec(m);
b = scaleVec(m, b);
x = emptyVec(m);
std::clock_t time_req;
time_req = clock();
for (int i = 0; i < N; i++) {
x1 = jacobiSolver(A, b, x, tol, maxIter);
}
time_req = clock() - time_req;
std::cout << std::fixed << std::setprecision(10) << (double)time_req / (CLOCKS_PER_SEC*N) << " ";
time_req = clock();
for (int i = 0; i < N; i++) {
x2 = conjGrad(A, b, x, tol, maxIter);
}
time_req = clock() - time_req;
std::cout << std::fixed << std::setprecision(10) << (double)time_req / (CLOCKS_PER_SEC*N) << " ";
x3 = subVec(x1, x2);
double norm = twoNormVec(x3);
if (norm <= 0.01) {
std::cout << "Pass" << std::endl;
}
}